
Today I gave the “entomological interlude” during a talk about Ludwig van Beethoven‘s arrangement of Johann Wolfgang Goethe‘s poem “Flohlied” which is a part of “Faust“. The seminar was part of a Cultual Creativity series through the Musicology Division at the University of Illinois. (NB: I am that person who can not read music, yet can recognize Beethoven’s 9th Symphony as the “Die Hard” theme song.)
Das Flohlied (Flea Song) is part of the scene “Auerbach’s Cellar in Leipzig” in Faust I (First published around 1790). The song is about a king who loved a flea on which he lavished many riches. The flea is fitted with fine clothing and is made Head of State. The flea’s family members are also awarded high positions in the government. The other members of the King’s court did not dare speak up and complain. Instead they tried to cope with the biting and the itching, but what they really wanted to do was kill the little critters.
William Kinderman presented a talk on the political satire conveyed by Beethoven in the composers correspondence and in his work around the time Beethoven wrote the music for the Flea Song. For the performance Prof. Kinderman was joined by tenor Jerold Siena.

I was to provide a little bit of background about the life history of fleas – the entomological interlude. There is much to tell about fleas, but I only had 10 minutes, and was speaking to a non-science audience that was there for the music. But I felt up for the challenge!
I decided to have Goethe’s words dictate the organization of the presentation. Below are my slides, the translation of the poem and my notes.

Thank you very much for inviting me to give a little bit of background about fleas and help you connect this insect with both Goethe and Beethoven. (As an aside: This is an iconic drawing of a flea by Robert Hooke from his 1665 book Micrographia, which can be viewed here on the campus of the University of Illinois at the Rare Books and Manuscripts Library)
A king there was once reigning, Who had a goodly flea, Him loved he without feigning, As his own son were he!
Let’s picture ourselves in late 18th Century Western-Europe. Goethe opens das FlohLied, with a description of a King actually being quite fond of a flea. We may consider that odd, and of course it is, but I think it is important to keep in mind that at that time society viewed ectoparasites such as fleas, lice, ticks and bedbugs more favorably, merely as a nuisance. This view of ectoparasites did not really change until the mid-19th Century when it was discovered that arthropods such as mosquitoes could vector horrible diseases. And not until about 1900 was it known that fleas vectored the bacterium that causes the plague.
In other words, a poem or song about a highly regarded flea is not as strange in 1760 as it may seem now.
 Some basic facts about fleas. Fleas are very small. The body of the flea is about 3mm long. Fleas belong to the insect order Siphonaptera, and there are about 2600 described species of fleas. Adult fleas feed on the blood of their mammalian or avian hosts. Only about a handful of the flea species live in close association with humans, and can use humans as a host but none are specialized on humans.
Some basic facts about fleas. Fleas are very small. The body of the flea is about 3mm long. Fleas belong to the insect order Siphonaptera, and there are about 2600 described species of fleas. Adult fleas feed on the blood of their mammalian or avian hosts. Only about a handful of the flea species live in close association with humans, and can use humans as a host but none are specialized on humans.
Fleas do not have wings, they are famous for their ability to jump – they have specialized legs. They have also physiological adaptations that help in dispersal. For instance, fleas are able, through the blood meal, to determine when a host rabbit is pregnant. In response female fleas will then start producing eggs. As soon as the baby rabbits are born, the female fleas make their way down to them and once on board they start feeding and laying eggs. After 12 days, the adult fleas make their way back to the mother. They complete this mini-migration every time the mother rabbit gives birth. So they don’t have to be able to fly or even jump very far to be able to disperse their offspring.
His tailor then he summon’d, The tailor to him goes; Now measure me the youngster For jerkin and for hose!
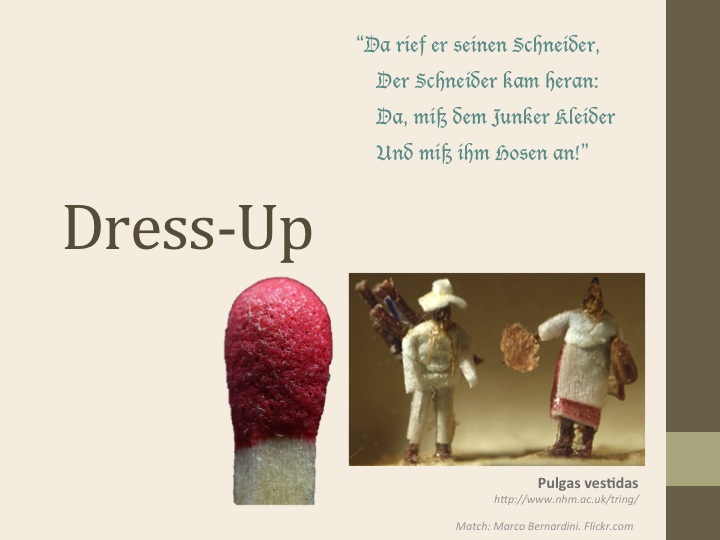
In the Flea Song the King calls upon dressmakers to make clothing for the fleas. Funny concept, of course, but not really that odd for that time period.
Around the time that Goethe wrote das FlohLied watchmakers tried to harness fleas, with tiny gold wires, to demonstrate their skills in fine manipulation.
In other parts of the world people also dressed up fleas. In Mexico there is a tradition of Pulgas Vestidas, where fleas are dressed and painted to represent people – such as brides and grooms. They are very very small – and probably only contain the head of the flea.
In satin and in velvet Behold the younker dressed; Bedizen’d o’er with ribbons, A cross upon his breast. Prime minister they made him, He wore a star of state; And all his poor relations Were courtiers, rich and great.

The late 18th century was the start of the flea circus mania in Europe. It is not clear to me if by 1790 this had reached Germany. But it again shows how enamored people (including the King) were with fleas. This is a picture from the famous flea circus in Copenhagen’s Tivoli Gardens, which was open until the mid 1960s. Fleas would be caught and rigged up in a harness made of thin gold wires. These harnesses could then be attached to props. Fleas were made to pull relatively large objects. Or they were given a ball to juggle or kick. [Video]
The gentlemen and ladies At court were sore distressed; The queen and all her maidens Were bitten by the pest, And yet they dared not scratch them, Or chase the fleas away.
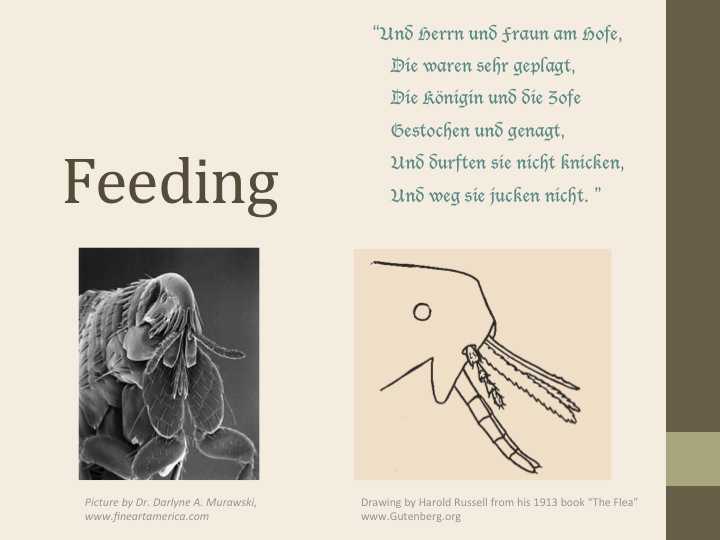
In the poem Goethe mentions that the people at the King’s court are getting bit and that the bites start to get itchy.
This is a very good description of a flea bite. Fleas bite…and they suck!
They have mouth parts, that are basically a pair of sharp lancets with serrated edges and a hard, sharp, awl-like instrument. They make a puncture in the skin, opening up blood vessels, and then suck up the blood by creating a tube with their mouth parts.
The flea’s saliva may cause an allergic reaction that results in welts and itching. It is the itching that usually sends people to the doctor and pets to the vet.
 As Professor Kinderman explained the representation of the flea’s jump is obvious in Beethoven’s music. The flea’s jump is an almost unbelievably fast, precise, and reliable motion.
As Professor Kinderman explained the representation of the flea’s jump is obvious in Beethoven’s music. The flea’s jump is an almost unbelievably fast, precise, and reliable motion.
Fleas can jump about 200 times their own body-length. The jump happens so fast that only about 5 years ago the high-speed camera technology was sophisticated enough to capture the jump in such a way that it could conclusively be shown what parts of the leg a flea uses to jump. [Video]
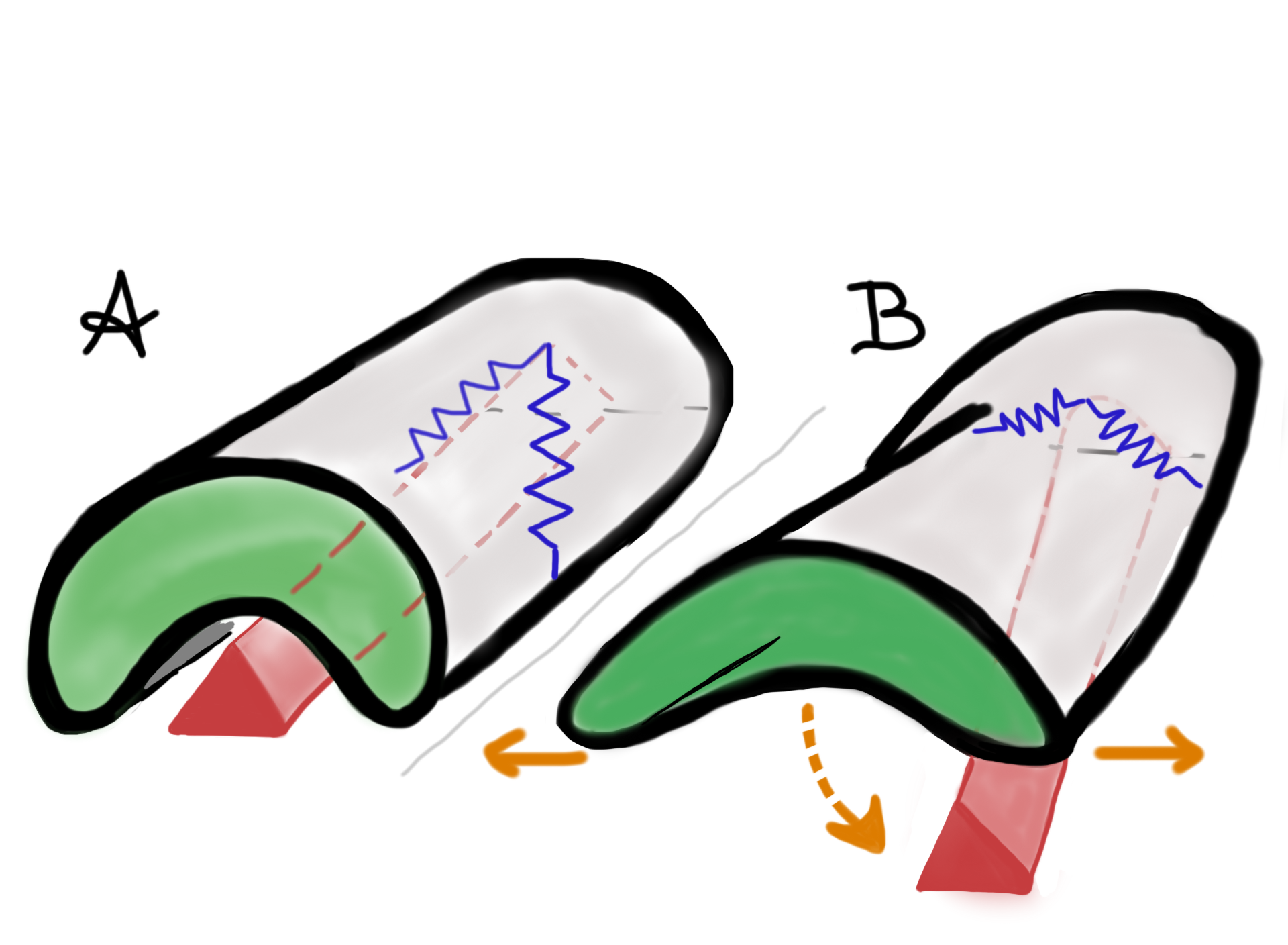
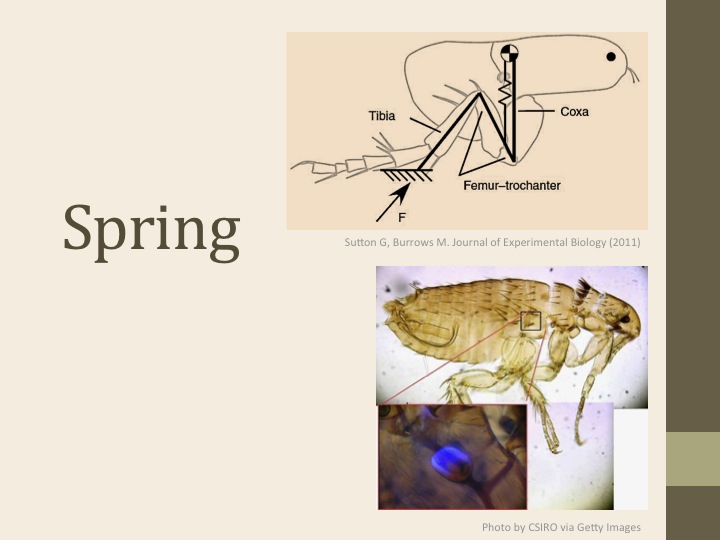 The energy for a flea leap comes from a spring inside the flea’s leg. This spring stores and then releases the energy needed to jump. Fleas first lock the joint between body and hind leg, and then they contract muscles within the body. This muscle contraction compresses part of the exoskeleton of the flea, most importantly a part of the body that contains the elastic protein resilin. So in the end, not just the muscle, but also the relatively rigid exoskeleton acts as a tensed spring. The lock on the hind legs is then released, and the rapid expansion of the spring releases the stored energy. The forces in the spring are transmitted through the leg, through the feet, to the ground, which propels the jump.
The energy for a flea leap comes from a spring inside the flea’s leg. This spring stores and then releases the energy needed to jump. Fleas first lock the joint between body and hind leg, and then they contract muscles within the body. This muscle contraction compresses part of the exoskeleton of the flea, most importantly a part of the body that contains the elastic protein resilin. So in the end, not just the muscle, but also the relatively rigid exoskeleton acts as a tensed spring. The lock on the hind legs is then released, and the rapid expansion of the spring releases the stored energy. The forces in the spring are transmitted through the leg, through the feet, to the ground, which propels the jump.
The resilin material is very interesting since it is very resilient, far more so than rubber we use in engineered devices. The flea can repeat this jump many times without suffering material fatigue.
 This brings me to the all important insect cuticle, or exoskeleton. Insects do not have a skeletal system like we do. Insects are covered with this, at least in my eyes, amazing material, made from pretty simple building blocks, that, depending on the species and life stage of the insect, can be hard (think of a beetle) or soft (think of a caterpillar).
This brings me to the all important insect cuticle, or exoskeleton. Insects do not have a skeletal system like we do. Insects are covered with this, at least in my eyes, amazing material, made from pretty simple building blocks, that, depending on the species and life stage of the insect, can be hard (think of a beetle) or soft (think of a caterpillar).
In this picture you can see that the cuticle of the flea is divided up into different segments, and that it may have some sensory hairs and glands – so it is not completely one rigid structure. This makes movement and interaction with the environment easier despite having an exoskeleton.
The cuticle is arranged hierarchically, and built from the bottom up – at atmospheric pressure and moderate ambient temperature – using materials that are readily available in nature. This manufacturing technique is not common in human manufacturing when we use lots of pressure, and heat, and nasty chemicals.
The cuticle is made up of different layers and these layers may not line up perfectly. This is a good thing. Sometimes a crack may appear but not be propagated further down, because the different hierarchical layers “stop” the crack. Again, we do no really engineer our materials with this level of resiliency.
(For more detail about the insect cuticle see posts on this blog here, here and here)
Of course, that fleas have such an amazing exoskeleton also has disadvantages…
If we are bit, we catch them And crack them without delay.
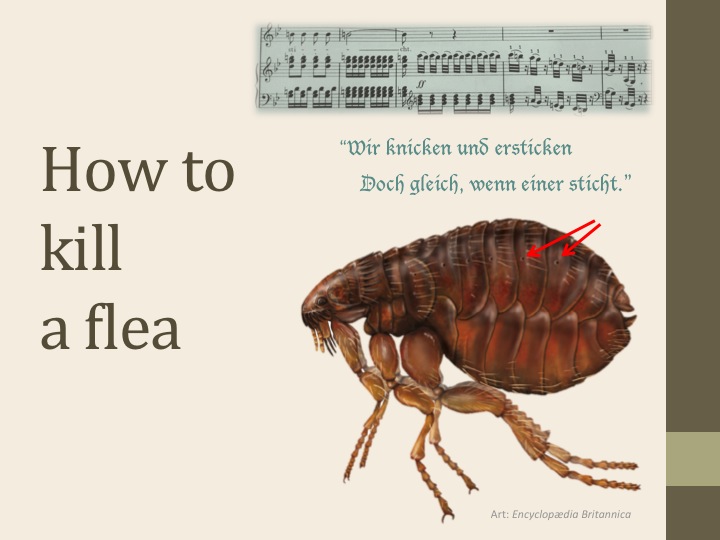
You can’t just squash a flea. Similar to bubble wrap if you push on a flea it compresses, it does not pop.
Since the flea’s cuticle is also made up of these different layers, and the layers are not very stiff it makes it that fleas are very difficult to kill. You cannot just step on them, stomp them, or crush them. You actually have to puncture the cuticle, maybe with your nails, and then bend them until they snap – “KNICKEN” as Goethe called it.
And then if you hold your finger on the flea you can also suffocate it “ERSTICKEN”, but this will not be so easy since fleas have multiple entry points for air (not just the mouth area as in mammals).
(Actually the best way to kill a flee is by rubbing it between your fingers so that the legs fall off…then it will not be able to find a new host and continue feeding
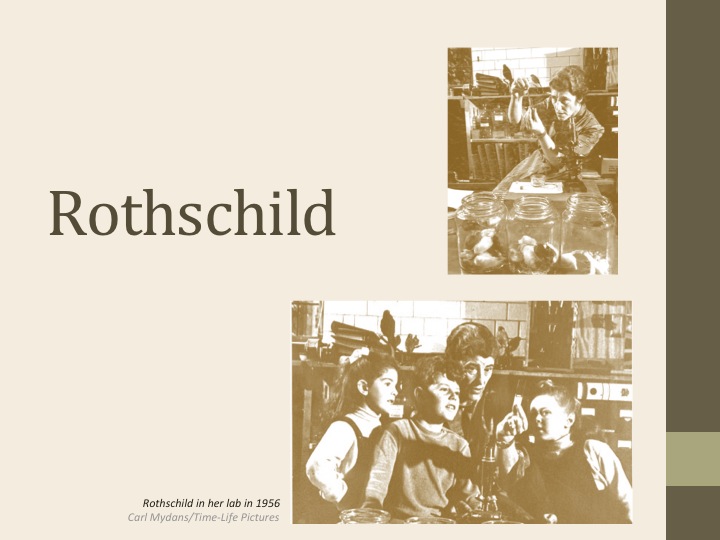 At the risk of going slightly off topic here I want to point out that much of the research done on fleas during the twentieth century was done by Dame Miriam Rothschild. Yes, she was a member of the famous bankers family. Miriam had become interested in fleas because her father Charles had started an impressive flea collection, and her uncle Walter a Natural History Museum.
At the risk of going slightly off topic here I want to point out that much of the research done on fleas during the twentieth century was done by Dame Miriam Rothschild. Yes, she was a member of the famous bankers family. Miriam had become interested in fleas because her father Charles had started an impressive flea collection, and her uncle Walter a Natural History Museum.
Miriam was the one who first described the endocrine regulation of reproduction in fleas, as I described, and was also the driving force behind figuring out how fleas jump – the biomechanics of the jump.
I cannot resist these wonderfully inspiring pictures of Rothschild in her (privately funded) lab with her children. She certainly is an inspiration to female scientists like myself.
Thank you so much for giving me the opportunity to share the wonderful lives of fleas with you.
 FleaSongFlyer (Art work by Nils Cordes)
FleaSongFlyer (Art work by Nils Cordes)